协作机器人定制改装:从需求到落地的完整路径
协作机器人定制改装:从需求到落地的完整路径
一台标准协作机器人买回来,装上夹爪就能干活,这是很多自动化入门企业的理想画面。但现实往往是,产线上需要抓取的工件形状不规则、安装空间被立柱挡住、工艺节拍要求机器人手臂必须斜着伸进设备内部——标准机型在这些场景里要么够不着,要么装不上,要么一运行就报警。协作机器人定制改装,正是在这种尴尬中成为越来越多企业的刚需。
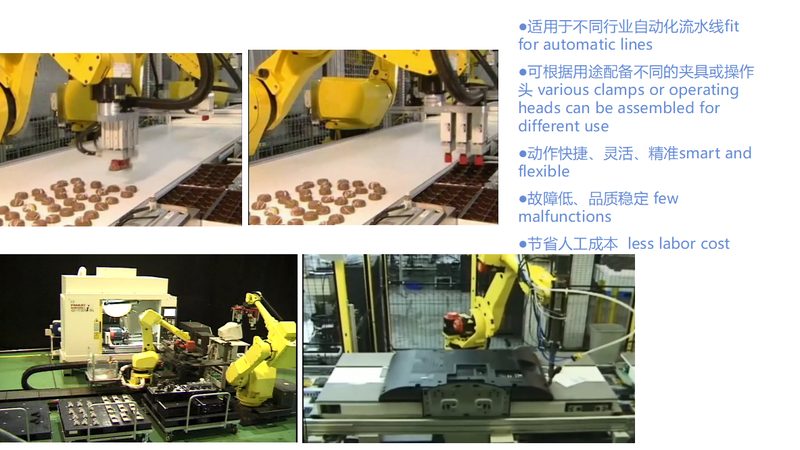
改装不是简单的换零件,而是围绕末端执行器、关节行程、控制系统和安装方式四个维度进行系统性调整。以末端执行器为例,市面上常见的电动夹爪和气动夹爪虽然通用性强,但遇到需要同时抓取两种不同材质工件、或者在抓取过程中需要旋转角度的场景,标准夹爪往往力不从心。定制改装的第一步,通常是设计一套复合型末端工具,比如将真空吸盘与机械夹爪集成在一起,通过气路切换实现抓取方式的动态切换。这种改装对电气接口和程序逻辑的要求较高,需要机器人厂家开放底层通讯协议,否则第三方工具无法被控制系统识别。
关节行程的改装往往被低估。很多企业以为协作机器人买回来,六个轴的角度范围是固定的,实际上部分高端机型允许在软件层面限制或扩展某些关节的运动区间。比如在狭小空间内,标准机型的大臂可能因为后摆角度过大而撞到设备外壳,这时可以通过修改关节软限位,将大臂的回转范围从正负180度压缩到正负120度。更极端的改装是物理更换减速器或电机,但这涉及机械结构的重新设计,通常只适用于批量定制的场景,单台改装的成本极高。
控制系统层面的定制改装是技术门槛最高的部分。标准协作机器人通常配备图形化编程界面,适合简单点位搬运,但当产线需要机器人根据视觉系统的实时反馈动态调整抓取路径时,原厂控制系统可能无法满足毫秒级的响应要求。这时就需要对控制器进行二次开发,将机器人的运动控制算法与视觉定位算法进行融合。行业内成熟的方案是采用基于EtherCAT总线的开放式控制器,配合ROS或CODESYS这类第三方开发平台,实现从视觉识别到轨迹规划的闭环。这种改装要求企业具备较强的软件工程能力,或者与机器人厂商的技术团队深度协作。
安装方式上的定制改装同样值得关注。标准协作机器人通常建议地面安装或倒装,但实际产线上经常遇到需要将机器人固定在移动AGV上、或者悬挂在龙门架上随行运动的情况。这时机器人的基座需要重新设计,不仅要考虑机械强度,还要解决随行运动中的动态负载补偿问题。比如在AGV上安装协作机器人时,如果AGV的定位精度只有正负5毫米,机器人末端执行器的重复定位精度就会受到牵连,必须在控制系统中加入AGV位置补偿算法。这种改装对机器人的动力学模型和实时控制能力提出了更高要求。
从行业趋势来看,协作机器人定制改装正在从零散的单点需求走向模块化、标准化的解决方案。一些机器人厂商开始推出可互换的关节模组、标准化电气接口和预置的二次开发工具包,让企业可以在不更换整机的前提下,根据产线变化快速调整机器人的功能。对于自动化设备企业而言,与其在项目现场反复调试标准机型,不如在前期就与机器人供应商共同评估改装方案,将末端工具、关节行程、控制系统和安装方式这四个维度作为必选项来规划。这样既能缩短部署周期,又能避免后期因功能不足而推倒重来。